1、首先是PLC的PNP輸出和安川伺服的NPN輸入的問題:
看論壇大部分的壇友都是說用光耦或者三極管把PNP的輸出轉換成NPN,但是,
安川的技術告訴我“直接反過來接,本來7腳接+24V,8腳接脈沖,改成7腳接脈沖,8腳接com,當然原來串接的2.2K電阻式少不了的”我不知道他這樣說的對不對,
同時西門子的技術告訴我沒辦法實現,要么更改伺服驅動的輸入形式,要么更換為CPU224XPSI,我提到轉換的問題,他說不一定能保證波形,而且這也不屬于他PLC范圍的問題(指把PNP轉換為NPN那部分電路)。
在網上查到說伺服驅動內部是雙向光耦的話,可以不用區分正負,那這樣的話是不是不論是PNP還是NPN都可以按照原來那種7腳接+24V,8腳接脈沖的方法來接呢
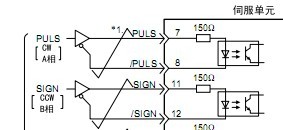
附安川接線圖
2、位置控制定位指令部分
看手冊、查壇友的發帖發現偏向于位控向導和MAP庫,到我想實現的功能好像位控向導不好實現,不知道MAP庫可以解決不,請大俠賜教,情況如下:
我是用CPU226控制2個變位機,是圓周運動不是絲杠,沒有用EM253模塊。Q0.0和Q0.1是脈沖輸出,Q0.2和Q0.3分別為2個軸的方向。用位控向導的話,只能給Q0.0或者Q0.1設置一個向導。但是我在實際過程中,需要用到幾段,比如說,第一次旋轉90度,工作一段時間后可能需要再旋轉60度,完成后再返回零位(初始位置)。
我的意思是用位控向導,在對Q0.0設定后,就決定了他的旋轉角度,不可再繼續添加關于Q0.0的向導了,用什么方法解決這個問題呢,只有自己編寫指令了嗎
 滬公網安備31010802001143號
滬公網安備31010802001143號

